- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Stepper motorren eta serboen eta serbomotorren arteko aldea ulertzeko artikulu bat
I. Urratseko motorren eta serboen eta serbomotorren arteko desberdintasunak
Urratseko motorra: begizta irekiko kontrol-elementuen urratseko motor zatien desplazamendu angeluarra edo lerroaren desplazamenduaren pultsu elektrikoaren seinalea da. Besterik gabe, pultsu elektrikoaren seinalean oinarritzen da angelua eta bira kopurua kontrolatzeko. Beraz, pultsu-seinalean bakarrik oinarritzen da zenbat biraketa zehazteko. Sentsorerik ez dagoenez, geldialdi-angelua desbideratu daiteke. Hala ere, pultsu-seinale zehatzak desbideratzea gutxitzen du.
Servomotorra: fidatu serbo kontrol zirkuituan motorraren abiadura kontrolatzeko, sentsorearen bidez biraketa posizioa kontrolatzeko. Beraz, posizioaren kontrola oso zehatza da. Eta biraketa-abiadura ere aldakorra da.
Servo (Servo Elektronikoa): Servoaren osagai nagusia serbo motorra da. Servomotorren kontrol-zirkuitua + engranaje murrizteko multzoa dauka. Bai, serbo motorrak ez du engranaje murrizketarik. Eta serboak engranaje murrizteko multzoa du.
Muga-serbo baten kasuan, irteera-ardatzaren azpian dagoen potentziometro batean oinarritzen da lema-besoaren gidatzeko angelua zehazteko. Serbo-seinalearen kontrola pultsu-zabalera modulatua (PWM) seinalea da, non mikrokontrolagailu batek seinale hori erraz sor dezakeen.
II. Urratseko motorren oinarrizko printzipioa
Nola funtzionatzen du:
Normalean motor baten errotorea iman iraunkor bat da, eta korrontea estatorearen harilkatuetatik igarotzen denean, estatorearen harilkatuek eremu magnetiko bektoriala sortzen dute. Eremu magnetiko honek errotorea angelu batez biratzera bultzatuko du, beraz, errotorearen eremu magnetikoen bikotearen norabidea estatorearen eremu magnetikoaren noranzkoaren berdina izango da. Estatorearen eremu magnetiko bektoriala angelu batez biratzen denean. Errotoreak ere angelu batez biratzen du eremu magnetiko honekin. Sarrerako pultsu elektriko bakoitzeko, motorrak pauso angelu bat aurrera egiten du. Irteerako desplazamendu angeluarra sarrerako pultsu kopuruarekiko proportzionala da, eta biraketa-abiadura pultsuen maiztasunarekiko proportzionala da. Harilak dinamizatzen diren ordena aldatuz gero, motorrak alderantzikatzen du. Hori dela eta, pultsuen kopurua eta maiztasuna eta motorraren fase bakoitzeko harilak dinamizatzeko ordena kontrolatu daitezke urrats-motorren biraketa kontrolatzeko.
Beroa sortzearen printzipioa:
Normalean motor mota guztiak ikusten dira, barneko burdinazko nukleoa eta bobina bobina dira. Haizearen erresistentzia, potentzia galera, galeraren tamaina eta erresistentzia sortuko ditu eta korrontea karratuarekiko proportzionala da, askotan kobre-galera gisa aipatzen dena, korrontea DC edo uhin sinusoidal estandarra ez bada, galera harmonikoa ere sortuko du; nukleoak histeresia korronte iragarki efektua du, eremu magnetiko alternoan galera ere sortuko da, materialaren tamaina, korrontea, maiztasuna, tentsioa erlazionatutakoa, burdinaren galera deitzen dena. Kobre-galera eta burdina-galera bero-sorkuntza moduan agertuko da, eta, beraz, motorraren eraginkortasuna eragingo du. Urrats-motoreak, oro har, kokapen-zehaztasuna eta momentu-irteera bilatzen ditu, eraginkortasuna nahiko baxua da, korrontea, oro har, handiagoa da eta osagai harmonikoak altuak dira, korrontearen maiztasuna abiadura eta aldaketarekin txandakatzen da, beraz, urrats-motorrek orokorrean bero-egoera izaten dute, eta egoera AC motor orokorra baino larriagoa da.
III. Lema-eraikuntza
Servoa, batez ere, karkasa batek, zirkuitu plaka batek, motor motor batek, engranaje-erreduktore batek eta posizioa hautemateko elementu batek osatzen dute. Bere funtzionamendu-printzipioa da hargailuak seinale bat bidaltzen diola serboari, eta zirkuitu-plakako IC-ak nukleorik gabeko motorra biratzen hasteko gidatzen duela, eta potentzia beso kulunkariari transmititzen zaio engranajearen bidez, eta, aldi berean, posizio-detektagailuak seinale bat bidaltzen du kokapenera iritsi den edo ez zehazteko. Posizio-detektagailua benetan erresistentzia aldakorra da. Serboak biratzen duenean, erresistentzia-balioa horren arabera aldatuko da, eta biraketa-angelua ezagutu daiteke erresistentzia-balioa detektatuz. Servomotor orokorra hiru poloko errotore baten inguruan inguratutako kobrezko hari mehe bat da, korronteak bobinan zehar igarotzen denean eremu magnetikoa sortuko du, eta errotorearen imanaren periferiak aldarapena sortzeko, eta horrek biraketa indarra sortzen du. Fisikaren arabera, objektu baten inertzia-momentua bere masarekiko zuzenean proportzionala da, beraz, biratu beharreko objektuaren masa zenbat eta handiagoa izan, orduan eta indar handiagoa behar da. Biraketa-abiadura azkarra eta potentzia-kontsumo txikia lortzeko, serboa zilindro huts oso mehe batean bihurritutako kobrezko hari mehez egina dago, polorik gabeko errotore huts oso arina osatuz, eta imanak zilindroaren barruan jartzen dira, hau da, katilu hutsaren motorra.
Lan-ingurune ezberdinetara egokitzeko, iragazgaitza eta hautsaren aurkako diseinuak dituzten serboak daude; eta karga-eskakizun desberdinei erantzunez, serboetarako plastikozko eta metalezko engranajeak daude, eta serboetarako metalezko engranajeak, oro har, momentu handikoak eta abiadura handikoak dira, engranajeak ez direla txirbilduko gehiegizko kargak direla eta. Goi-mailako serboek boladun errodamenduekin hornituta egongo dira biraketa azkarragoa eta zehatzagoa izan dadin. Baloi baten eta bi errodamenduen artean aldea dago, noski bi errodamendu hobeak dira. FET serbo berriek batez ere FET (Field Effect Transistor) erabiltzen dute, barne-erresistentzia baxua eta, beraz, transistore arruntak baino korronte-galera txikiagoa izatearen abantaila duena.
IV. Servo funtzionamendu-printzipioa
Pwm uhinetik barne-zirkuituan alborapen-tentsio bat sortzeko, kontaktore-sorgailuak engranajearen bidez potentziametroa mugitzera bultzatzeko, tentsio-diferentzia zero denean, motorra gelditzen da, serboaren eragina lortzeko.
Servo PWM-en protokoloak berdinak dira, baina agertuko diren azken serboak desberdinak izan daitezke.
Protokoloa, oro har, hau da: maila handiko zabalera 0,5 ms ~ 2,5 ms-tan, serboa angelu ezberdinetan biratzeko kontrolatzeko.
V. Servomotorrek nola funtzionatzen duten
Beheko irudian LM675 potentzia-anplifikadore operatibo batekin egindako serbo-motor kontrol-zirkuitu bat erakusten da, eta motorra DC serbo-motor bat da. Irudian ikus daitekeenez, LM675 potentzia-anplifikadore operatiboa 15V-rekin hornitzen da, eta 15V-ko tentsioa LM675 eragiketa-anplifikadorearen sarrera fasean gehitzen da RP 1 bidez, eta LM675-ren irteera-tentsioa serbomotorrearen sarrerara gehitzen da. Motorra abiadura neurtzeko seinale-sorgailu batekin hornituta dago, motorraren abiadura denbora errealean detektatzeko. Izan ere, abiadura seinale-sorgailua sorgailu moduko bat da, eta bere irteera-tentsioa biraketa-abiadurarekin proportzionala da. G abiadura neurtzeko seinale-sorgailuaren tentsio-irteera eragiketa-anplifikagailuaren alderantzizko sarrerara itzultzen da abiadura-errorearen seinale gisa tentsio zatitzailearen zirkuitu baten ondoren. RP1 abiadura-aginduaren potentziometroak ezarritako tentsio-balioa eragiketa-anplifikadorearen sarrera fasean gehitzen da R1.R2-k tentsio zatitu ondoren, erreferentziako tentsioaren baliokidea dena.
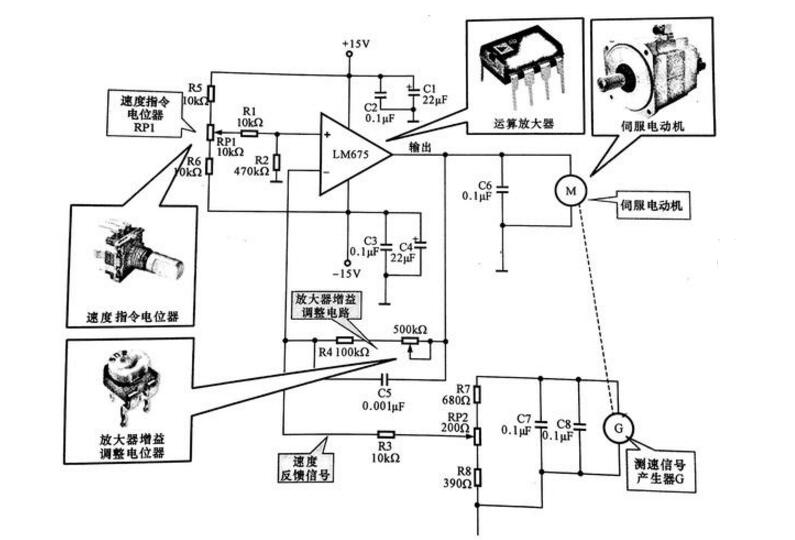
Serbomotorraren kontrol-eskema
Servomotorra: Serbomotorrentzako M hizkiarekin adierazita, gidatzeko sistemaren energia iturria da. Eragiketa-anplifikadorea: zirkuituaren izenaz adierazten dena, hau da, LM675, serbo-kontroleko zirkuituko anplifikadore-pieza bat da, serbomotorrentzako disko-korrontea ematen duena.
Abiadura-agindu-potentziometroa RP1: Eragiketa-anplifikadorearen erreferentzia-tentsioa ezartzen du zirkuituan, hau da, abiaduraren ezarpena. Anplifikadorearen irabazia doitzeko potentziometroa RP2: zirkuituan erabiltzen da anplifikadorearen irabazia eta abiaduraren feedback seinalearen tamaina, hurrenez hurren, doitzeko.
Motorraren karga aldatzen denean, eragiketa-anplifikagailuaren alderantzizko sarrerara itzultzen den tentsioa ere aldatzen da, hau da, motorraren karga handitzen denean, abiadura txikiagotzen da eta abiadura-seinale-sorgailuaren irteerako tentsioa ere gutxitzen da, eragiketa-anplifikagailuaren alderantzizko sarrerako tentsioa txikiagotu dadin eta tentsio honen tentsio-irteera eta erreferentzia-eragiketa tentsio honen eta erreferentzia-erreferentzia handitu egiten da. handitzen. Alderantziz, karga txikiagoa denean eta motorraren abiadura handitzen denean, abiadura neurtzeko seinale-sorgailuaren irteerako tentsioa igotzen da, eragiketa-anplifikagailuaren alderantzizko sarrerari gehitutako feedback-tentsioa handitzen da, tentsio honen eta erreferentzia-tentsioaren arteko aldea txikiagotzen da, eragiketa-anplifikatzailearen irteerako tentsioa gutxitzen da eta motor-abiadura murrizten da horren arabera biraketa-abiaduran automatikoki egonkor dadin.